光鑷——自由式激光陷阱,包括沿任意曲線的高強度和相位梯度力,能夠限制多個粒子并驅動它們的運動,從而加快或減慢它們的速度。 本文**根據(jù)我們的知識報告如何在樣品深處實驗性地創(chuàng)建這樣的陷阱,以構建旋轉膠體馬達并研究不同配置的粒子動力學。 這種新型激光工具為微尺度的水動力學和光流體力學研究開辟了廣闊的前景。
微觀科學,納米科學和技術中的許多應用需要捕獲和操縱介電膠體顆粒。 這些粒子的受控運動引起適合于研究流體動力學微系統(tǒng)和微流變學的流體流動。 例如,旋轉電介質顆粒的膠體電機可用于微流體中的局部混合,以及用于分析微觀物體和復雜微系統(tǒng)之間的流體動力學相互作用,例如布朗棘輪。 在過去的幾十年中,通過聚焦具有高數(shù)值孔徑(NA> 1)顯微鏡物鏡的激光束產生的光學陷阱已經(jīng)被證明是這些應用的必要工具。 數(shù)字全息技術用于激光束整形和粒子跟蹤已經(jīng)徹底改變了微尺度和納米級粒子操縱,力和位置測量。 特別是全息生成的激光渦旋光束能夠在被捕獲的粒子上施加扭矩允許創(chuàng)建光學驅動的微泵。 然而,高斯渦旋陷阱呈環(huán)狀或其他形狀[6由于其軸向強度梯度較弱而具有重要的局限性,其不能補償光散射力。 這個事實解釋了為什么高斯渦旋陷阱**制推動蓋玻片玻璃的粒子,該玻璃作用于樣品室或另一個介質界面(例如,水 - 空氣)。 還可以通過使用快速時間控制來執(zhí)行三維(3D)多粒子操縱由計算機生成的全息圖生成的多個斑點狀陷阱。 該方法非常適用于結構的組裝和單個粒子控制,但不適用于多粒子動力學的研究。 此外,它需要高速計算和空間光調制器(SLM)。 其他運輸多顆粒的建議利用了Bessel的特定特征和艾里梁,但實現(xiàn)的粒子軌跡是固定的。
真正的3D渦流陷阱能夠在沒有腔室壁的幫助下限制一個或多個顆粒并將它們圍繞環(huán)移動使用聚焦的螺旋貝塞爾光束創(chuàng)建。 具體而言,與高斯渦旋相比,該光束的高強度梯度(HIG)允許3D俘獲,而由渦旋產生的相位梯度力驅動粒子沿著環(huán)運動。 HIG和相位梯度力對于構建能夠移動多個粒子甚至抵抗光輻射壓力的3D激光陷阱至關重要。 這是三維曲面陷阱設計的關鍵點,在某些區(qū)域,光束傳播方向和粒子運動方向相反。 此外,在所提及的應用中,尺寸通常在200-1000nm范圍內的顆粒必須被深深地捕獲在樣品內,遠離室壁足夠遠,以避免由于近端壁效應引起的不希望的流體動力學擾動。 這是特別難以實現(xiàn)的,因為使用高NA透鏡的穩(wěn)定捕獲通常限制在距離腔室底部表面幾微米的位置。 另一個具有挑戰(zhàn)性的問題是創(chuàng)建單光束自由式陷阱 - 其形狀和驅動力可以適應特定任務 - 能夠以受控方式在3D中移動這樣的小粒子。 它們的HIG和相位梯度必須沿曲線獨立規(guī)定,以便在不改變陷阱形狀和尺寸的情況下加速或減慢粒子運動。
在本文中,我們演示了如何使用全息技術用于3D光束整形,以創(chuàng)建滿足上述要求的自由式光陷阱。 我們通過實驗驗證這些陷阱的能力 - 以環(huán)形,三角形,方形和3D曲線的形式,包括環(huán)形螺旋形 - 用于運動控制樣品 內深達25μm的1μm介電粒子。 這些粒子足夠小以預測納米粒子的捕獲,并且足夠大以跟蹤它們并且表征它們在3D陷阱中的流動。 我們發(fā)現(xiàn)幾何形狀與環(huán)不同的自由式陷阱有一個固有的非均勻相分布,解釋了觀察到的不均勻粒子運動。 這一事實和自由式陷阱的簡單設計為集體粒子動力學的研究開辟了新的途徑。
我們的光鑷設置包括倒置顯微鏡,標準反射空間光調制器SLM(Holoeye PLUTO,像素尺寸為8μm)和高速sCMOS相機(Hamamatsu,Orca Flash 4.0,16位灰度,像素尺寸為6.5μm)。 為了產生俘獲光束,尋址到SLM的僅相位全息圖調制輸入準直激光束(激光量子,Ventus,λ532nm,1.2 W),然后投射(使用1×開普勒望遠鏡)進入顯微鏡物鏡的后孔(Olympus UPLSAPO,1.4 NA,100×,油浸), *后,該鏡頭高度聚焦后一種光束(鏡頭輸入功率為170 mW),在樣品中產生3D陷阱,該樣品包括分散在去離子水中的1μm二氧化硅顆粒(Bang Labs)。 將樣品封閉在通過將玻璃蓋玻片(厚度0.17mm)附著到標準顯微鏡載玻片上而制成的腔室中。 為了達到在樣品深處捕獲的能力,使用具有比標準(n = 1.51)更高折射率(n 1.56,Cargille Labs,A系列)的浸油。 見。 通過使用這種浸油,可以將捕集器剛度提高3倍,從而穩(wěn)定地捕獲樣品中1微米深的介電粒子.
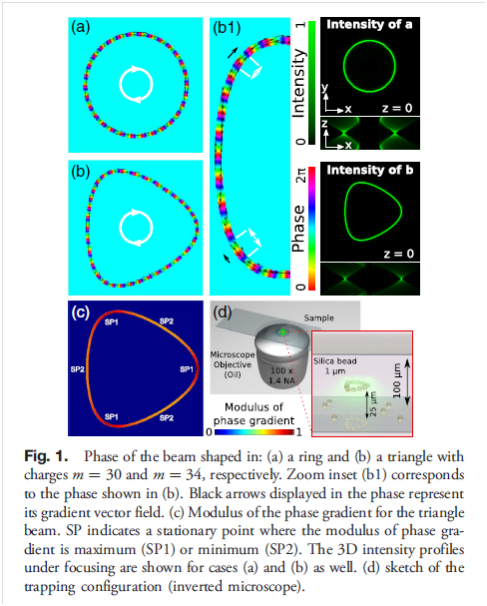
在環(huán)形陷阱的情況下,被困顆粒呈現(xiàn)均勻的順時針旋轉(見 圖1),而在三角形的情況下(另見 圖1)和方(見 圖2如前所述,當接近拐角時,顆粒加速。 為了幫助光束 - 粒子相互作用的可視化,針對每種情況顯示通過將所有記錄的幀組合成單個圖像而制成的延時組合物; 見圖的右圖 2。 這允許人們觀察沿著彎曲梁的粒子流的強烈限制。 實際上,所有粒子都與曲線緊密配合,從而顯示出俘獲光束的形狀。 在方形陷阱的情況下,由于它們之間的碰撞,一些顆粒*終會在拐角處逸出; 看圖中的延時圖像(在右下角)。 2(c) 和 可視化2。 如在觀察中所見 可視化1 和 可視化2通過改變SLM中顯示的全息圖H rc3,捕獲的粒子流可以在幾何形狀(保持幾乎所有粒子)中從環(huán)切換到三角形并在幾毫秒內變成正方形。 這一事實,以及切換運動方向(m> 0順時針,m <0逆時針)的選項,以及增加粒子的旋轉速率而不改變光束的大小和幾何形狀,強調了開發(fā)陷阱的多功能性。 為了說明顆粒的運動方向和可變轉速的切換,一個m 15的環(huán)形陷阱(轉速為保持環(huán)半徑的0.3 Hz)和m 30(0.5 Hz的旋轉速率)如 圖3。 這些結果表明,多個小介電粒子可以被限制在不同的幾何形狀中并且通過可變相位梯度力來操縱。 而且,它遠離室壁實現(xiàn),因此避免了不希望的流體動力學效應。

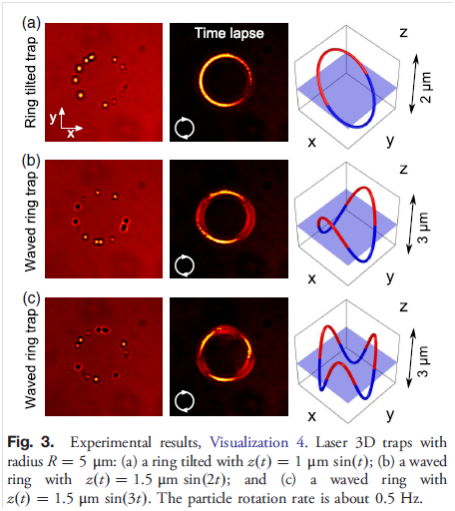
利用三維彎曲圈閉可以研究更多有趣的粒子動力學。在這種情況下,由于相位梯度的作用,被捕獲的粒子向下游甚至上游移動,與激光源的光輻射壓力相反——由于相位梯度。 這在不同的配置中觀察到:傾斜的環(huán)形陷阱(圖2)。 3(a))和波形環(huán)陷阱顯示在圖1和2中。 3(b) 和 3(c); 也可以看看 圖4。 注意,如在延時流圖像中觀察到的,粒子的圖像根據(jù)其相對于顯微鏡物鏡的焦平面的3D位置而由于散焦而變化。 有趣的是,在所考慮的三個陷阱中,旋轉速率(范圍0.4-0.5Hz)是相似的,因此盡管存在多個上游運動,但是顆粒的平均速度仍然保持不變; 見圖。 3 和 圖4。 具體地,上游軌跡中的粒子運動比粒子加速的下游粒子運動慢,因此保持了陷阱中的粒子旋轉速率。 光束的相位梯度重新定向部分輻射壓力,以產生足夠強的光學力,使粒子向上游移動,同時也加速粒子向下游運動。 這些結果強調了光輻射壓力和驅動粒子運動的相位梯度之間的重要相互作用,而HIGs沿著3D曲線保持穩(wěn)定的俘獲。 此外,后面的例子說明了如何實時創(chuàng)建,控制和切換可重構拖拉機橫梁; 看到 可視化4.
通過使用所提出的技術,可以創(chuàng)建在3D曲線幾何中擴展的更復雜的粒子流。 例如,在圖 4,考慮由嵌入環(huán)形表面的螺旋曲線形成的陷阱。 該環(huán)形3D陷阱的投影在x-y平面中具有海星形狀,如圖3中的延時流動圖所示。 4。 與前面的例子一樣,顆粒被很好地限制并沿著曲線順時針旋轉。 然而,當一些粒子沿著曲線移動時,其他粒子在頂部頂點保持準穩(wěn)定平衡曲線(見圖。 4),粒子經(jīng)歷力的平衡。 可視化5 顯示一個從頂點1開始的粒子(見圖。 4,時間0 s)然后在2 s內執(zhí)行上下游運動后到達頂點2。 在這一點上,它推動另一個粒子,將其從準穩(wěn)定平衡中釋放出來。 該釋放的粒子朝向頂點3和4,執(zhí)行另一個上下游運動。 粒子流中的這種類似于billard的行為沿著整個陷阱延伸。 這些結果說明了自由式陷阱作為研究粒子間相互作用的工具所起的作用。
在我們所觀察到的所有陷阱中,我們觀察到單個被捕獲的粒子沿著曲線行進的速度比多個被捕獲粒子的情況慢。 例如,在環(huán)形陷阱中,單個粒子的旋轉速率為0.2 Hz,而對于多個粒子,速率增加到0.5 Hz(可視化1)。 顆粒平均速度的增加是由包括流體動力學相互作用在內的集體效應引起的。 實際上,由相位梯度力驅動的被捕獲的粒子具有由于流體動力學牽伸而推動并拉動相鄰粒子的能力,這是在粘性流體(水)中移動的顆粒的膠體系統(tǒng)的特征。
自由式3D激光陷阱在設計能夠限制和驅動多個粒子的光學力方面提供了重要的自由度,這在許多應用中是需要的。 例如,3D粒子運動非常適合于構造新一代旋轉膠體馬達,其引起不同幾何形狀的流體流動。 這些電動機可用于開發(fā)微流體工具或應用于浸沒流體的流變學研究。 自由式陷阱也為設計布朗棘輪鋪平了道路其中切換開和關狀態(tài)的外力是沿著陷阱規(guī)定的相位梯度力。 此外,它們允許研究由光和流體動力學相互作用以及光學結合效應引起的多粒子動力學的重要方面。 光學力的設計及其對粒子的傳輸和組織的影響對于微圖案生成也是有希望的。
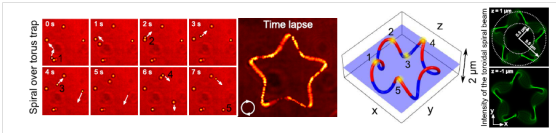
實驗結果顯示,光學感應粒子運動在三維螺旋激光陷阱。這張延時圖像顯示了粒子流動,顯示出海星的形狀,這與捕獲光束的形狀非常吻合(右圖)。三維扭轉螺旋曲線的上角和下角分別用紅色和藍色表示。